编者按:为进一步促进学术资源共享与学术交流合作,快速传递和分享各研究领域的高质量学术论文,确保师生能够及时获取最新研究成果及前沿学术动态,自动化学院特开设“学术快讯”新媒体专栏,旨在通过精心筛选和整理,致力于将最新的、具有影响力的学术文章呈现给读者。本期推荐论文:《面向任意旋转朝向机动的空间旋转系绳系统抗饱和控制》。
一、中文题目:面向任意旋转朝向机动的空间旋转系绳系统抗饱和控制
二、英文题目:Saturated Control of Space Tether System for Maneuvering between Arbitrary Spinning Orientations
三、作者信息:陆宏湜,王长青,孙晨阳,李爱军,尤里・扎波罗特诺夫
四、发表刊物:Journal of Guidance, Control, and Dynamics
五、论文索引信息:https://doi.org/10.2514/1.G008252
六、论文简介:
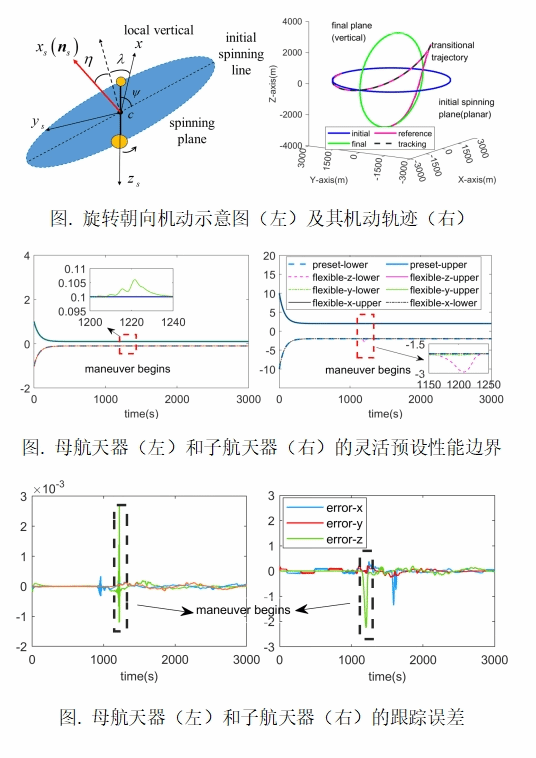
空间旋转系绳系统通过柔性系绳连接两个航天器组成,其绕质心自转模式类似链球运动。凭借其大尺寸、轻质量和强自转稳定性的特点,空间旋转系绳系统能够完成传统航天器技术不能实现或难以经济实现的任务,被认为在碎片清理、载荷传输、人工重力以及太空观测等前沿空间任务中有着广阔应用前景。由于空间旋转系绳系统的大尺寸和强刚-柔耦合特性,其三维空间内的旋转运动变换对控制提出了较高要求。然而,现有的数学模型在描述空间旋转系绳系统大范围空间机动时面临奇点和位姿解算耦合的问题,控制律也较少考虑电推进器控制大尺寸、大惯性系统面临的输入饱和问题。上述问题导致常规控制策略无法有效控制朝向机动过程。本论文针对上述问题,开展了旋转朝向机动过程的动力学建模及抗饱和控制研究。首先,定义了新的自旋坐标系,实现旋转运动与轨道运动的解耦描述,并在此基础上建立了修正牛顿-欧拉模型,从而解决了现有模型面临的奇点和解算耦合问题。随后,研究了典型旋转朝向间的平滑机动方案和对应的参考控制输出。接着基于上述方案,通过引入辅助系统调整性能函数包络以满足实时输入饱和限制,利用反步法计算最终闭环控制输出,从而设计了基于灵活性能边界函数的抗饱和控制律。最后,通过仿真验证了所提出的动力学模型描述大范围机动运动的准确性,以及抗饱和控制律在大范围空间机动任务中的有效性。
来源:王长青
审核:王小旭









