一、中文题目:算术均值密度融合-第四篇:基于变分近似的分布式随机有限集滤波器融合方法
二、英文题目:Arithmetic Average Density Fusion- Part IV: Distributed Heterogeneous Fusion of RFS and LRFS Filters via Variational Approximation
三、作者信息:李天成, 梁浩哲, 李固冲*, Jesus Garcia Herrero, 潘泉
四、发表刊物:IEEE Transactions on Signal Processing
五、论文索引信息:doi: 10.1109/TSP.2025.3550157
六、论文简介:
随着传感器技术的更新迭代,现代感知系统趋向于使用多种不同类型的传感器组成异构传感器网络,实现对监控区域内信息的全方位多角度感知。在基于异构传感网的多目标跟踪任务中,每种传感器节点都具有不同的计算、存储能力以及量测模型,因此适合运行不同种类的滤波器,其中最常用的是随机有限集(RFS)滤波器。RFS理论可以将目标的出生、消亡以及传感器的虚警、漏检建模为多种随机点过程,由此产生了多种异构的RFS滤波器,如何融合不同种类滤波器获取到的异构多目标概率密度成为了亟待解决的难点,该领域并没有能实现异构MPD融合的有效解决方案。
针对此问题,本论文考虑了三种最常见的RFS滤波器的分布式融合场景,分别为高斯混合概率假设密度滤波器(GM-PHD filter)、多伯努利滤波器(MB filter)以及标签多伯努利滤波器(LMB filter)。在本论文的前序部分《Arithmetic Average Density Fusion- Part II: Unified Derivation for Unlabeled and Labeled RFS Fusion》中作者已证明,所有RFS滤波器之间多目标概率密度(MPD)的算术均值(AA)融合其本质均为概率假设密度(PHD)融合,而PHD融合可以获得对任意区域内目标数量的一致性估计。在本论文中,三种RFS滤波器的异构MPD均被转换为PHD并进行AA融合。随后,为保证各个滤波器的闭合性,需要通过最小化KL散度来将融合后PHD中的信息反馈至本地滤波器的MPD中,而两者均为高斯混合分布的形式,KL散度不存在解析解。为此,作者采用了变分近似方法推导出KL散度的变分上界,通过最小化变分上界实现了由PHD至MPD的信息反馈,最终得到两种优化方法:variational GC-weight-fit 与variational GM-PHD-fit。前者仅优化本地MPD中高斯组件的权重,计算量较小。后者优化本地MPD的所有参数,因而精度更高。实验表明本文所提方法大幅提升了三种滤波器的跟踪精度,首次实现了异构RFS滤波器的分布式协同,填补了这一领域的空白。此研究的亮点工作在于摆脱了在MPD层面寻求融合方法的定式思维,转而在PHD公共空间进行AA融合并将信息反馈回异构MPD中,为概率密度融合领域打开了新思路。
七、论文网址:https://ieeexplore.ieee.org/document/10920474
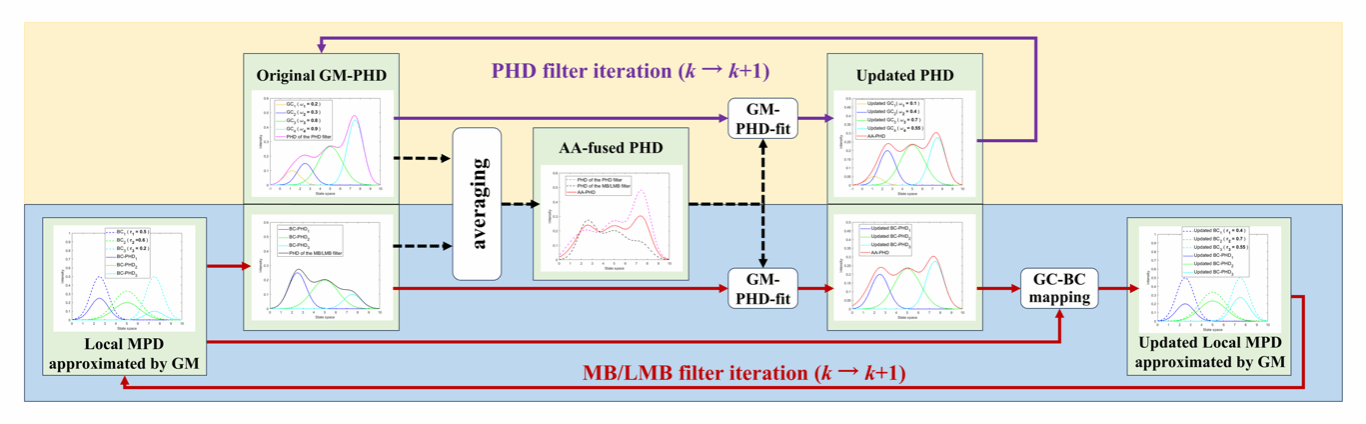 图1 异构RFS-AA融合流程图
图1 异构RFS-AA融合流程图
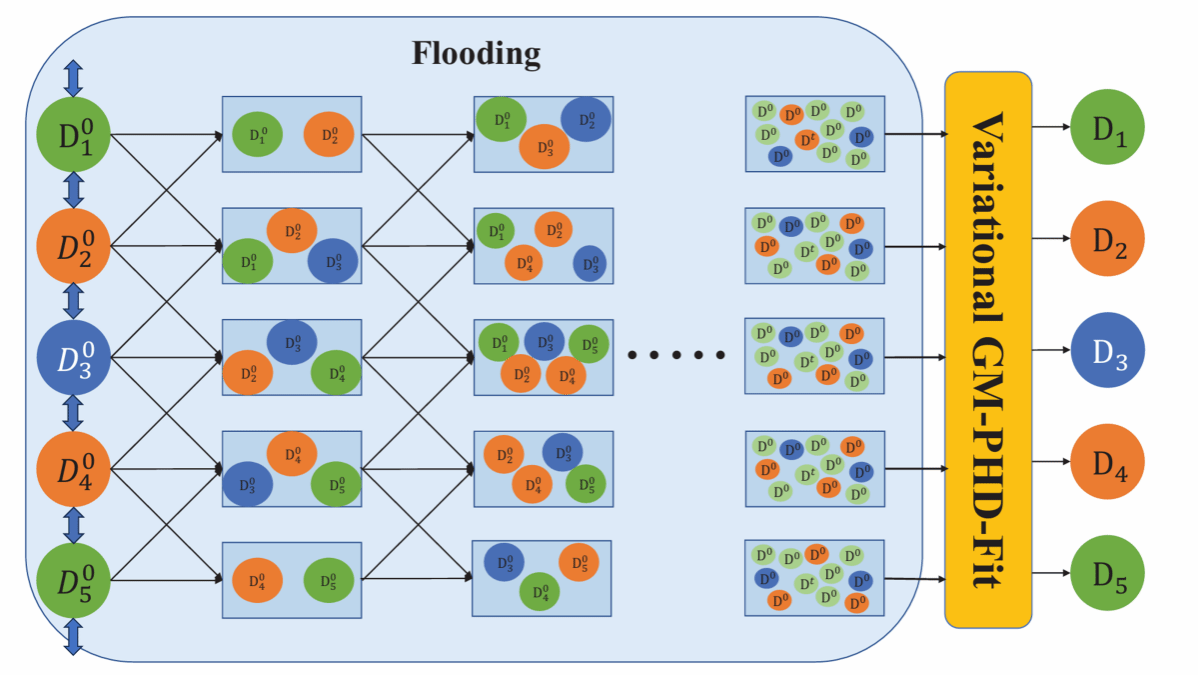
图2 基于Flooding模式的异构RFS-AA融合示意图
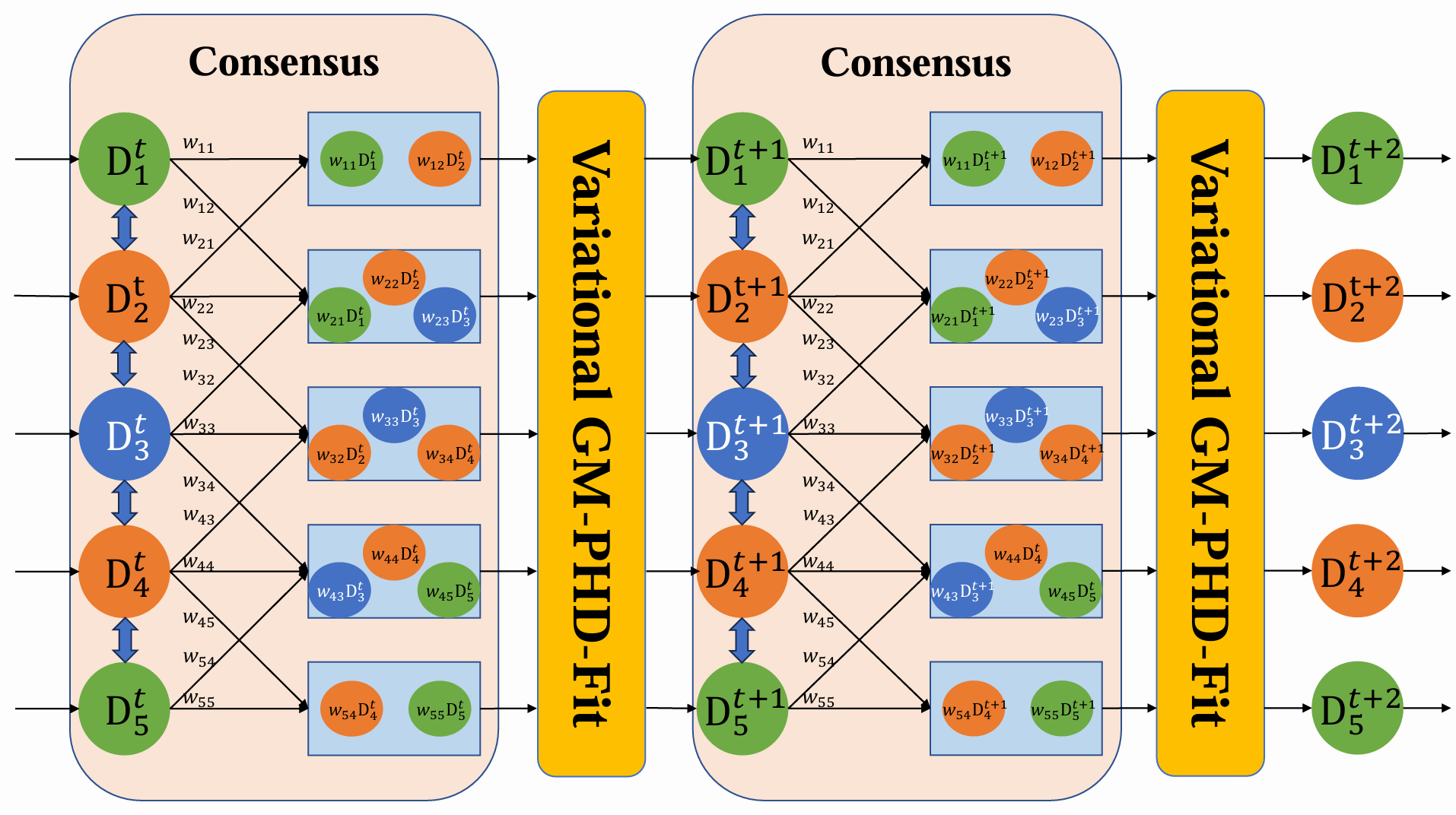
图3 基于Consensus模式的异构RFS-AA融合示意图
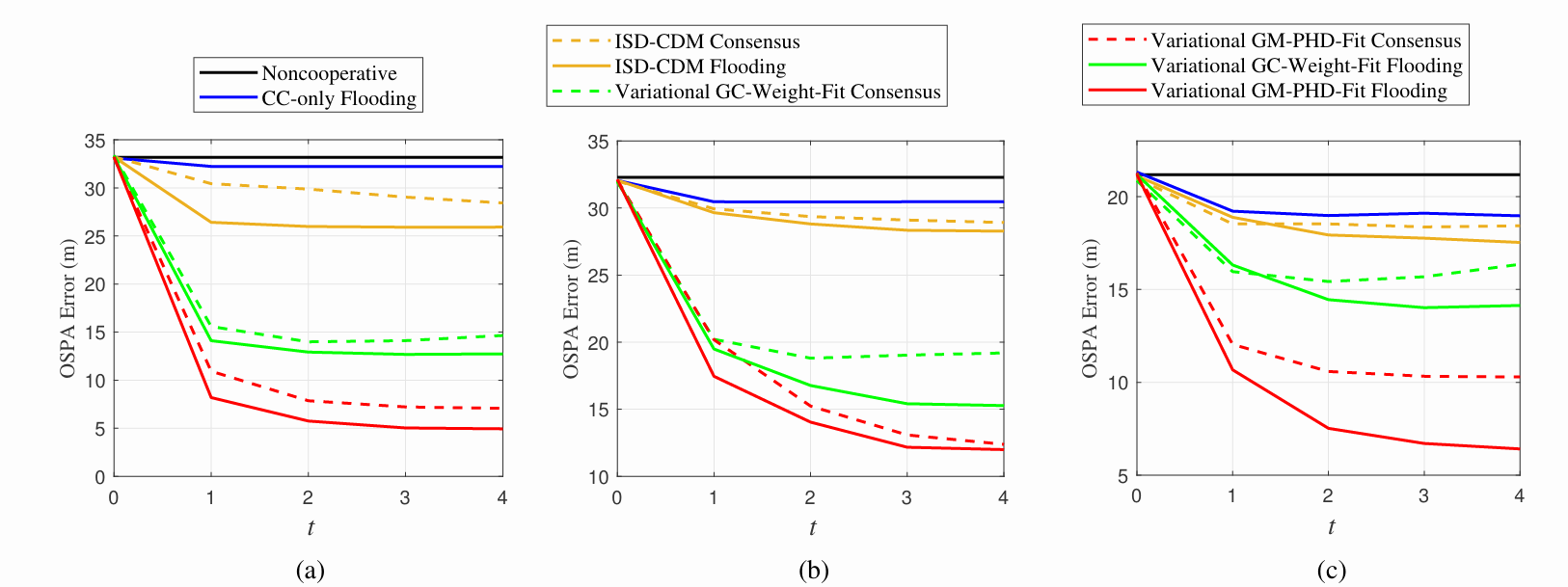
图4 三种RFS滤波器分布式融合后的跟踪误差随迭代次数的变化(从左至右分别为PHD滤波器、MB滤波器与LMB滤波器)
八、资助信息:
本工作得到了国家自然科学基金、陕西省自然科学基础研究计划、航空科学基金等项目经费的支持。
来源:李天成教授、潘泉教授团队
审核:王小旭









