一、答辩总体安排
二、答辩简介
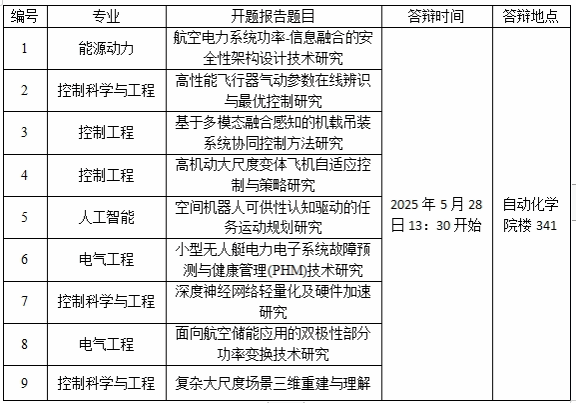
1:航空电力系统功率-信息融合的安全性架构设计技术研究
基于航空电力系统和电网控制中心的交联特征,开展航空电力系统功率-信息融合的安全性架构设计及控制策略研究,在民用航空多模态场景的演化机理、系统安全性建模与拓扑优化、安全架构设计及控制策略这三个层面开展工作,从而满足未来多电/全电飞机对电力系统安全性和可靠性的更高要求。
2:高性能飞行器气动参数在线辨识与最优控制研究
面向高性能飞行器飞行控制设计对精确气动数学模型的需求,结合参数可辨识性分析理论、激励信号离线优化算法与基于回归向量动态扩张的在线辨识方法开展高性能飞行器通用气动参数辨识方法研究,建立高精度气动参数在线辨识系统,为控制律设计提供精确的数学模型,提升飞行控制系统的可靠性与自适应性。
3:基于多模态融合感知的机载吊装系统协同控制方法研究
本课题面向窄舱货密的极端装/卸,着力攻克机载吊装系统在多模态融合与协同控制方面的关键技术难题。通过深入研究多模态信息感知与获取、多模态数据融合理论与算法创新、面向军事复杂工况的协同控制策略以及智能吊装系统功能验证等方面,旨在全面提升机载吊装系统在军事任务中的作业效能,确保在复杂军事工况下,能够实现快速、精准且安全的无人化物资吊运与装备投放,为增强部队作战能力与保障水平提供强有力的技术支撑
4:高机动大尺度变体飞机自适应控制与策略研究
针对大尺度变体飞机航向稳定性差、易单边失速、控制通道耦合严重等问题。建立大尺度变体飞机构型变化的动态数学模型,探索基于新型V尾的横航向变稳控制机理,研究大尺度变体飞机变前/后掠翼和V尾的稳定协调控制及分配方法,实现飞机横航向控制和稳定性的动态调节,在保证飞机具备高速突防隐身性的同时增强其近距机动飞行能力。
5:空间机器人可供性认知驱动的任务运动规划研究
为提升空间机器人在轨服务的自主性和智能化水平,针对空间非结构化场景认知推理能力不足、认知不确定下多约束任务运动混合规划困难,以及动作执行不确定导致规划鲁棒性低等问题,开展空间机器人在轨装配过程的认知推理驱动任务运动规划研究。在长期调研与仿真实验分析的基础上,确定基于自主认知理论框架,融合视觉可供性分析、符号逻辑推理、空间机器人运动规划等方法,构建具备自主认知推理能力的任务运动混合规划研究方法,通过逐步递进的研究框架,赋予空间机器人应对不确定场景的自主规划能力,进而提升空间机器人规划系统的鲁棒性。
6:小型无人艇电力电子系统故障预测与健康管理(PHM)技术研究
针对海洋无人艇电力电子系统在复杂多应力耦合环境下面临的高故障率与运维成本难题,本研究提出“多模态数据融合-物理嵌入轻量化模型-系统级动态维护”三层协同技术体系。首先,融合电、热、振动等多源异构数据,构建高精度故障传播预测模型;其次,设计物理知识嵌入的轻量化深度学习架构,实现边缘端实时状态诊断与寿命预测;最后,结合动态风险评估生成自适应维护策略,降低过维护率与停机风险。
7:深度神经网络轻量化及硬件加速研究
针对深度神经网络日益庞大的参数规模和计算开销严重限制了其在边缘端设备上的部署。围绕着现有轻量化方法信息丢失严重导致轻量化后模型精度较低以及没有充分考虑硬件特性导致模型实际加速与理论不匹配。重点突破基于双域度量的通道合并剪枝、基于重要性度量的分组量化、Roofline模型引导的剪枝、动态耦合剪枝量化框架这四个关键技术。进而构建硬件平台适配的轻量化算法模型,推动边缘智能的进一步发展。
8:面向航空储能应用的双极性部分功率变换技术研究
随着多电飞机发展以及飞机供电系统扰动功率等级的提升,传统的全功率变换器已无法满足飞机供电系统对高效率和高功率密度的要求,严重影响了航空储能系统功率等级的提高和飞机电气化的发展。本研究将建立航空储能系统功率控制架构评估方法,并基于架构评估提出适用于飞机供电系统的部分功率架构;基于汇流条电压瞬态特性和部分功率处理原理,提出一种双极性部分功率拓扑,并从电路参数和控制层面进行优化设计,解决双极性拓扑高降压比下效率低的问题,以满足高效率高功率密度管理扰动功率的要求;建立航空储能系统工作电压模型,基于该模型提出一种系统级多目标优化设计方法,实现航空储能系统高效率、高可靠性运行。本研究将为储能系统在飞机供电系统中的大功率应用提供有效支持,促进飞机多电化发展。
9:复杂大尺度场景三维重建与理解
以当前大规模场景重建和协同感知所面临的“数据采集受限”,“信号多源异构”以及“场景复杂多变”等问题为出发点,在长期调研、海量采集数据和大量计算资源的基础上,研究基于大模型的泛化3D-GS快速准确重建方法,多任务的场景重建和协同感知系统以及开放环境下的多智能体快速协同感知机理,实现开放环境下大场景的快速、准确的协同建图和感知。









