编者按:为进一步促进学术资源共享与学术交流合作,快速传递和分享各研究领域的高质量学术论文,确保师生能够及时获取最新研究成果及前沿学术动态,自动化学院特开设“学术快讯”新媒体专栏,旨在通过精心筛选和整理,致力于将最新的、具有影响力的学术文章呈现给读者。本期推荐论文:《有向网络上异构系统的鲁棒事件触发分布式最优协同》。
一、中文题目:有向网络上异构系统的鲁棒事件触发分布式最优协同
二、英文题目:Robust Event-Triggered Distributed Optimal Coordination of Heterogeneous Systems Over Directed Networks
三、作者信息:先程鑫,赵宇*,温广辉,陈关荣
四、发表刊物:IEEE Transactions on Automatic Control (IEEE T-AC)
五、论文索引信息:DOI: 10.1109/TAC.2023.3335797
六、论文简介:本文研究了非平衡有向通信网络上受外部扰动的异构多智能体系统的鲁棒分布式最优协同问题。每个智能体的动力学由异构线性空间方程描述,且输入信道受到时变外部扰动干扰,智能体之间通信关系由一个有向通信网络表示,每个智能体都具有一个仅由自身所知的局部目标函数。该问题的目标是通过设计分布式最优协同算法,使得全局目标函数(所有局部目标函数的和)最优,智能体的输出实现协同(达到共同的最优点),并且克服外部扰动的影响。
在智能体连续通信的情况下,本文采用一个用来估计非平衡有向网络Laplacian矩阵0特征值对应左特征向量的平衡补偿器,来克服有向网络Laplacian矩阵非对称导致的系统平衡点偏移的问题。而后,利用智能体输出信号的相对误差信息以及智能体自身目标函数的梯度信息设计了一个基于梯度下降法的最优策略生成器。此外,为解决智能体动力学异构且常规的线性系统理论算法无法直接应用的问题,利用输出调节技术构造矩阵方程,设计了一个输出调节跟踪控制器,实现智能体输出对于最优信号的跟踪。同时将一个自适应外部扰动观测器嵌入到算法中以克服外部扰动的影响。在提出的连续时间鲁棒分布式最优协同算法作用下,所有智能体的输出都能达到一个共同的最优值,局部目标函数的和实现最小化,同时也能够克服时变外部扰动的影响。
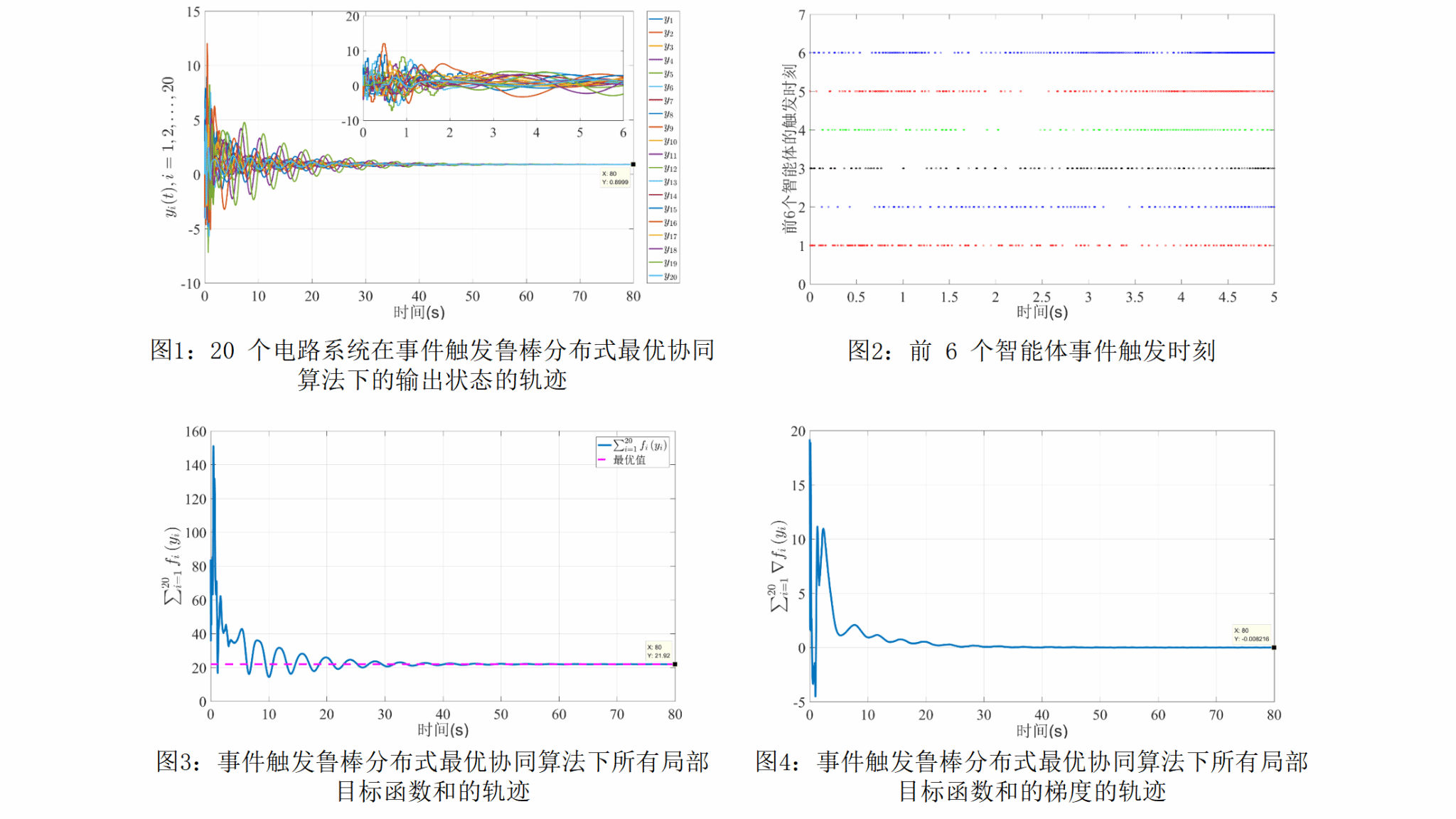
在智能体通讯能量或带宽受限的情况下,引入事件触发的通信机制,为需要智能体间相互通信的平衡补偿器以及最优策略生成器设计相应的事件触发条件来确定下一次通信时刻。接着,设计了一类时间依赖增益来克服触发条件下平衡补偿器的奇异问题。进一步,提出由事件触发平衡补偿器、事件触发最优策略生成器、自适应外部扰动观测器以及输出调节跟踪控制器组成的事件触发鲁棒分布式最优协同算法。提出的事件触发算法不仅能实现系统的最优协同目标,同时能够大大降低通讯频率,提高系统资源利用效率。
与现有的优化算法相比,本文的优点如下:1)在通信网络方面,通过引入平衡补偿器,解决了不平衡有向通信网络上的分布式最优协同问题,大大放宽了现有文献中要求通信网络无向或者有向平衡的假设。2)在智能体动力学方面,不仅考虑系统的内部不确定性 (异构动力学),还考虑了外部不确定性 (外部扰动),动力学更具有一般性和实用性。所设计的鲁棒分布式最优协同算法不仅可以克服时变外部扰动,也不需要严格的初始化条件。3)在能源消耗及信息保护方面,事件触发机制的引入可以减少智能体间连续的信息传输,提高系统资源利用效率,较少的信息传输,对通信信息安全保护方面也起到了一定的帮助。
(来源:赵宇;审核:王小旭)









