编者按:为进一步促进学术资源共享与学术交流合作,快速传递和分享各研究领域的高质量学术论文,确保师生能够及时获取最新研究成果及前沿学术动态,自动化学院特开设“学术快讯”新媒体专栏,旨在通过精心筛选和整理,致力于将最新的、具有影响力的学术文章呈现给读者。本期推荐论文:《仅使用距离量测的多无人机协同环绕未知目标》。
一、中文题目:仅使用距离量测的多无人机协同环绕未知目标
二、英文题目:Cooperative circumnavigating of unknown target by multi-UAV using only distance measurements
三、作者信息:黄山,吕永玺*,朱奇,李珂澄,史静平
四、发表刊物:航空学报
五、论文索引信息:Doi: 10.7527/S1000-6893.2023.29535
六、论文简介:
对地面目标的侦察和监视是无人机的典型应用,其目的是通过无人机携带的传感器进行信息获取来提高态势感知能力。使用无人机对地面目标进行环绕是完成侦察监视任务的得力手段,也是未来无人智能驾驶的前瞻性研究。现有的多数环绕控制方法的研究中假设无人机可以获取目标的完备信息,尤其是目标的位置信息。在实际中,获取目标的完备信息需要付出高昂的代价。对于非合作目标而言,实现其环绕通常需要获取相对方位角信息或者相对距离信息。通常,基于方位的环绕策略要求无人机的全局位置信息是可访问的,由于全球定位系统(Global Position System, GPS)可能受到恶意攻击、中断甚至破坏,极大地阻碍了其在敌对环境中的应用。为此,提出了一种新型的仅使用距离量测信息的分布式环绕导航控制方法。首先,假设实际距离和距离变化率可用的情况下,设计了一种制导控制器驱动单架无人机环绕目标运动。其次,利用二阶滑模观测器在有限时间内完成距离变化率的估计来代替实际距离变化率。观测器的设计使用实际距离量测信息,使得无人机仅利用距离量测即可完成环绕任务。然后,在距离环绕控制器的基础上,利用有限时间观测器和距离量测信息完成相对位置估计,进而设计速度协调算法来实现在GPS拒止环境下多无人机对未知目标的均匀环绕。最后,通过数字仿真和硬件在环试验验证了所提方法的有效性和鲁棒性。
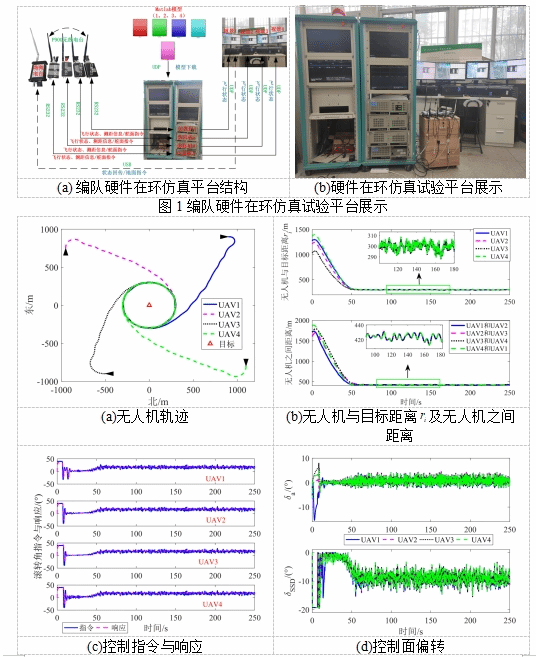
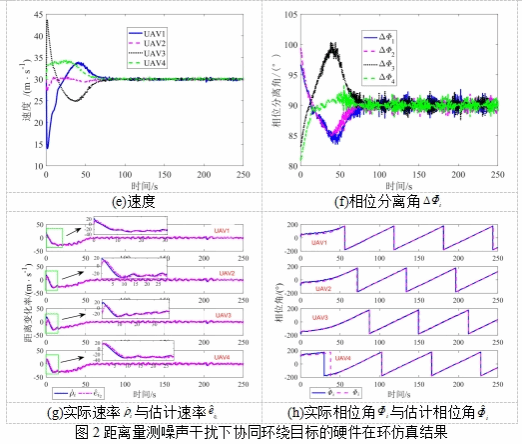
图2 距离量测噪声干扰下协同环绕目标的硬件在环仿真结果
来源:史静平团队
审核:王小旭









