近日,自动化学院集群智能课题组在协同控制领域取得了令人瞩目的进展,研究团队首创“非光滑盈余”高精度控制方法,成功解决了非对称网络上集群系统对动态非合作目标高精度协同跟踪与围捕的核心挑战。相关研究成果发表于控制领域权威刊物IEEE Transactions on Automatic Control (IEEE TAC长文,DOI: 10.1109/TAC.2025.3629024) 。该成果为空间目标协同围捕、航天器自主回收、飞行器集群博弈对抗等关键任务提供了奠定坚实的理论基础。
提出“非光滑盈余”概念,攻克非对称网络上动态目标高精度中心跟踪挑战
为应对动态非合作目标集群协同围捕问题中,多目标动态轨迹中心跟踪难的挑战,团队针对非对称网络上分布式平均跟踪理论问题开展研究,创新地提出了“非光滑盈余”概念,将其成功引入分布式平均跟踪控制器设计中,攻克了非对称网络拓扑的不平衡条件,实现了对多目标动态轨迹中心的精确跟踪。相关结果以长文形式发表于控制领域权威期刊《IEEE Transactions on Automatic Control》(IEEE TAC),题为《有向通信网络上的分布式平均跟踪:一种非光滑盈余方法》(Distributed Average Tracking over Directed Communication Networks: A Nonsmooth Surplus Approach)。该论文由西北工业大学自动化学院博士研究生曹润华与自动化学院赵宇教授共同完成,索引信息参见DOI: 10.1109/TAC.2025.3629024(全文https://ieeexplore.ieee.org/document/11226888)。
突破非对称网络与非光滑分析融合难的瓶颈,提出有向图上最小割的理论分析新方法
该研究提出的非光滑盈余分布式平均跟踪控制器展现出三方面显著优势:在非对称网络中具备有效跟踪能力、对网络拓扑结构突变具有良好适应性,并能够在大规模网络中保持较低的计算成本(图1)。在理论分析层面,针对传统二次型Lyapunov方法在非对称网络与非光滑分析融合失效的瓶颈问题,研究团队创新的构建出矩阵摄动与有向图上最小割的理论分析新方法,给出全新的稳定性分析技术。首次从底层拓扑视角给出了控制增益的稳定性条件,为复杂通信环境下的控制系统设计提供了坚实的理论方法。
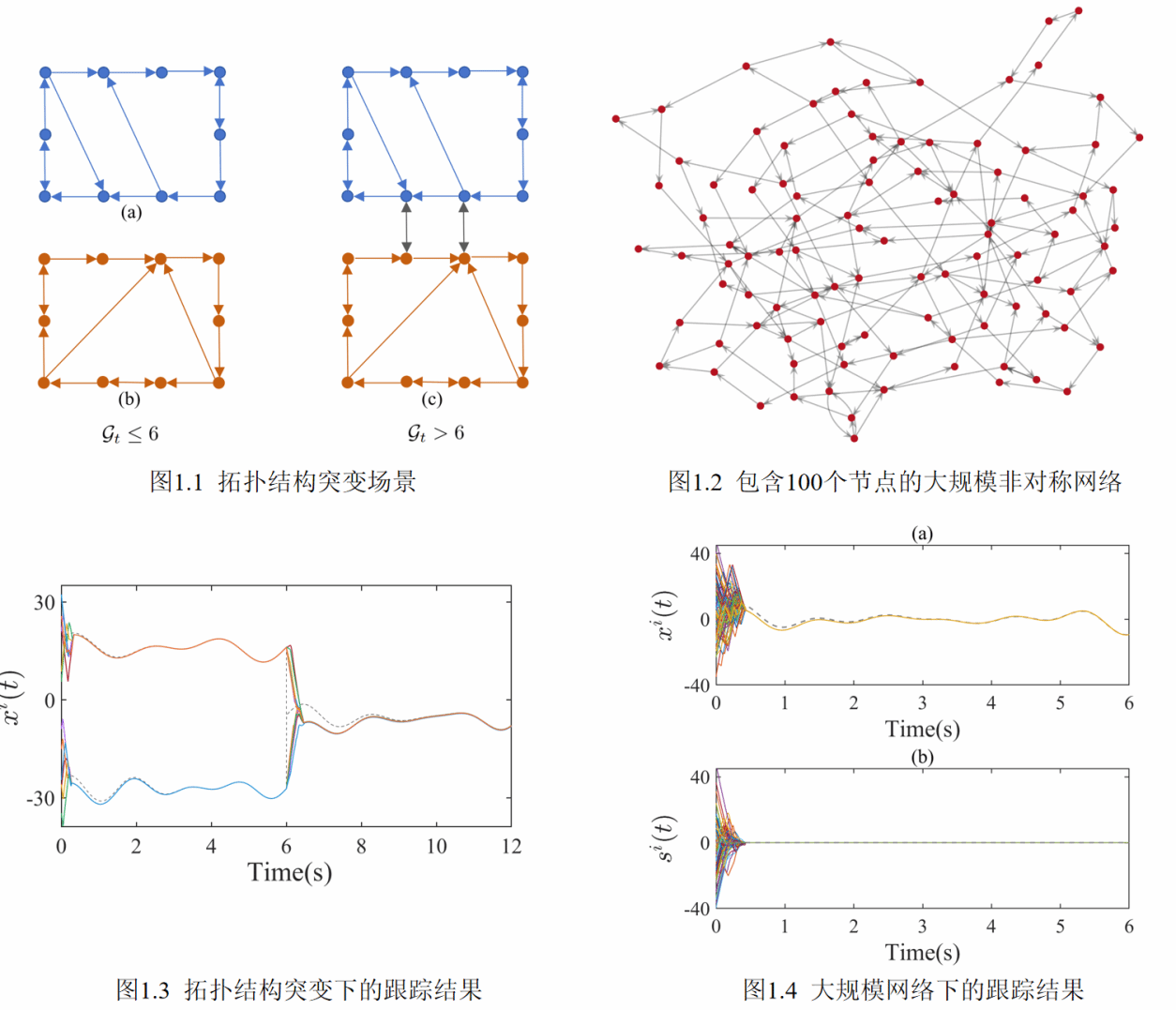
图1非对称网络上动态目标高精度中心跟踪仿真验证
多样化探测网络上动态非合作目标协同围捕仿真验证,成果转化未来可期
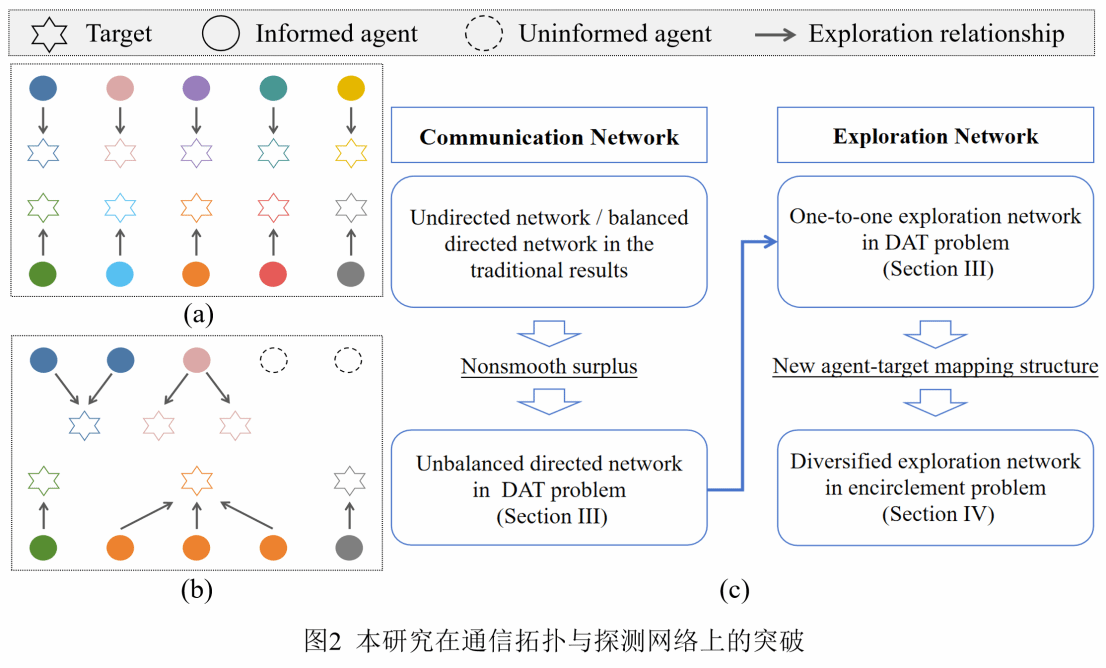
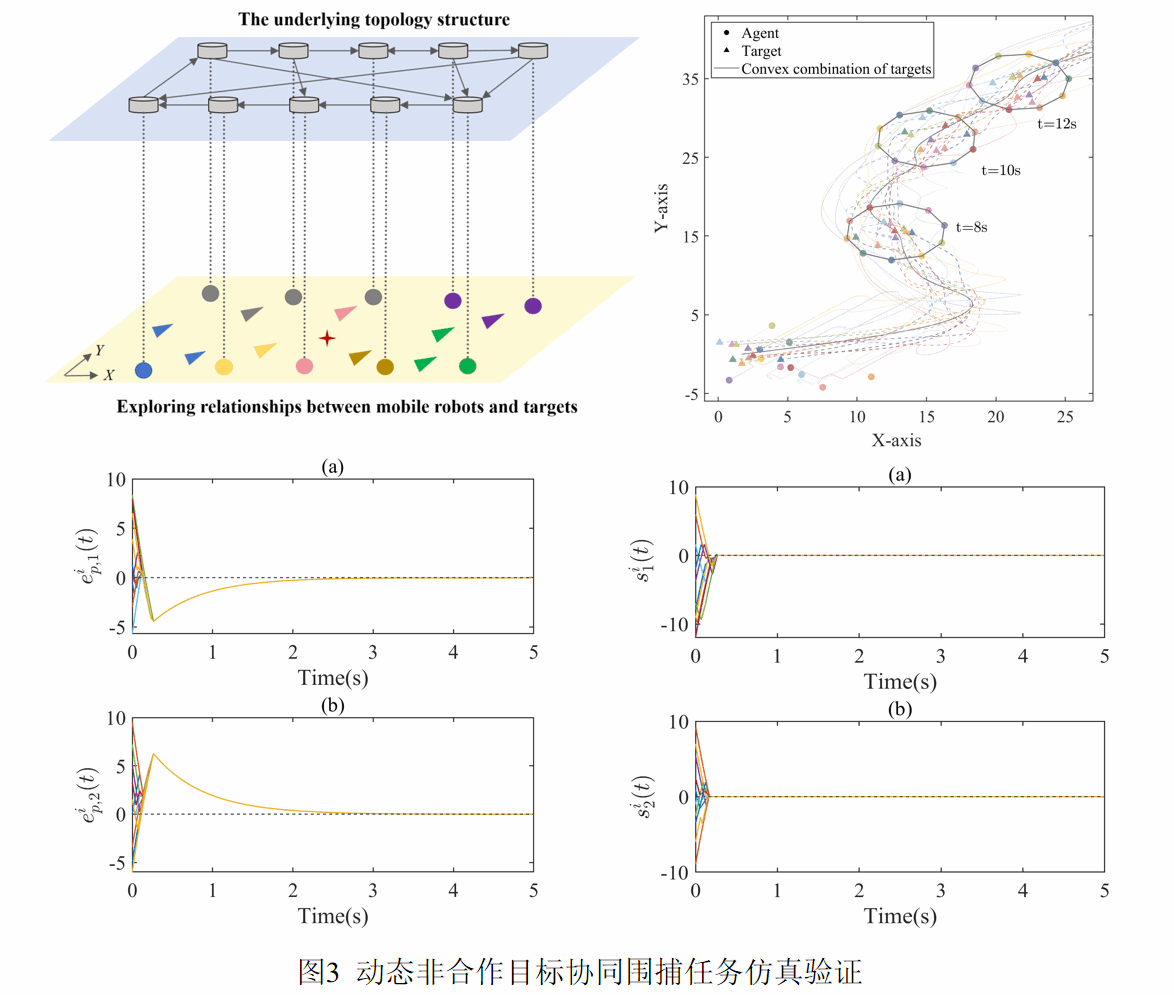
为验证算法的实际性能,研究团队将非光滑盈余分布式平均跟踪方法拓展于多样化探测网络中的非合作动态目标协同围捕任务。所提出的多样化探测网络突破了传统分布式平均跟踪方法对拓扑结构与智能体-目标探测关系“一对一”的严格限制(图2),实现了支持“一对一”、“一对多”、“多对一”等多样化探测情形的分布式平均跟踪。基于该场景开展的数值仿真表明(图3),算法运行稳定可靠,成功验证了其在非合作动态目标协同围捕方面的优越性能。该成果有望推动集群多样化协同探测、空间安全与人工智能等多个领域向更高效、更智能的方向发展。
自动化学院集群智能研究团队的这一理论突破,不仅为学术界提供了新的研究思路和方法,更为相关产业的智能化升级注入了强大动力。相信在未来,随着研究成果进一步转化应用,研究成果将会在更多领域大放异彩,在集群具身智能、低空协同经济等十五五重点攻关的科学技术领域做出更大贡献。
撰稿:赵宇
审核:王小旭









